








MATEK Mateksys F405-WSE F405 WSE Asa MPU6000 Baro OSD Blackbox F4 Controlador de Vôo 2-6S INAV RC Avião de Asa Fixa FPV Drones
R$298.85
R$254.05
Disponível:Em estoque
Detalhes
(PDF) FC Especificações
MCU: 168MHz STM32F405RGT6 1MB Flash
IMU: MPU6000 (SPI1)
Baro: DPS310 (I2C1)
OSD: AT7456E (SPI2)
Blackbox: MicroSD de soquete (SPI3)
A VCP & 6x UARTs,
1x Softserial_Tx opção (TX2 pad, INAV)
10x saídas de PWM(S1~S9, DIODO emissor de luz)
2x I2C
3x ADC (tensão, corrente, RSSI)
3x LEDs para FC ESTADO (Azul, Verde) e 3,3 V indicador(Vermelho)
Construído em inversor UART2-RX para SBUS entrada
PPM/UART Compartilhada: UART2-RX
1x SH1.0_6pin conector (4V5/G/TX4/RX4/DA2/CL2) para GPS/bússola
1x SH1.0_6pin conector para USB externos e campainha
DJI FPV OSD: reposição UART
FrskyOSD: reposição UART Poder
6~30V DC IN (2~LiPo 6S)
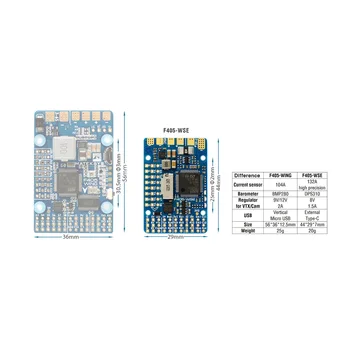
132A de alta precisão do sensor de Corrente (Escala de 250)
PDB/sentido Corrente do resistor de: 60A contínua, 132A explosão.
BEC 5V 2A para o FC & Periféricos
BEC Vx 5A para servos, 5V/ 6V opção
BEC 8V 1.5 UM para VTX e câmera
IDL 3,3 V 200mA
Tensão da bateria do Sensor: 1 k:10k FC Firmware
INAV Alvo: MATEKF405SE
ArduPilot hwdef: MATEKF405WING Física
Dimensões: 44 x 29 x 10 mm
Montagem: 25 x 25 mm, Φ2mm
Peso: 20g p/ placa inferior e USB/campainha adaptador Incluindo
1x FC F405-WSE
1x USB(Tipo C)/Buzzer (Ativo) Adaptador
1x placa de Fundo, 44 x 29mm
2x JST-SH-6P para JST-SH-6P cabos, 20cm
5x de Bronze espaçadores, M2*4mm
10x parafusos M2*3,5 mm
A Dupont 2.54 pinos (Conselho é fornecido dessoldado)
INAV mapeamento
PWM
Almofada
Nome do PINO
TIM
INAV Multi-Rotor
INAV Avião
S1
PB7
TIM4_CH2
Motor
Motor
S2
PB6
TIM4_CH1
Motor
Motor
S3
PB0
TIM3_CH3
Motor
Servo
S4
PB1
TIM3_CH4
Motor
Servo
S5
Anticongelantes e de descongelamento pc8
TIM8_CH3
Motor
Servo
S6
PC9
TIM8_CH4
Motor
Servo
S7
PB14
TIM12_CH1
Servo
Servo
S8
PB15
TIM12_CH2
Servo
Servo
S9
AP8
TIM1_CH1
Servo
Servo
LED
PA15
TIM2_CH1
2812LED
2812LED
ADC
Sem almofada
1K:10K divisor interno
6~30V entrada
a bordo de tensão da bateria
INAV Escala 1100
BataFlight Escala 110
Sem almofada
0~3,3 V
a bordo de um sensor de corrente
Sacle 250
RSSI Pad
0~3,3 V
Analógico RSSI
I2C
DA2 CL2
I2C2
Magnetômetro (HMC5883 /MAG3110 /QMC5883 /IST8310)
DA2 CL2
I2C2
Velocidade do ar (MS4525)
DA1 CL1
I2C1
OLED 0.96"
DA1 CL1
I2C1
a bordo do Barómetro DPS310
UART
RX1 TX1
UART1
Reposição
TX2 RX2
UART2
Receptor (CrossFire)
RX2
UART2
Receptor (IBUS, Spektrum DSM/SRXL , SUMD)
RX2
Receptor PPM (desativar Serial RX em UART2)
Sbus
UART2
Receptor SBUS, Construído no inversor UART2-RX
TX2
Softserial1_TX
Frsky SmartPort
TX3 RX3
UART3
Reposição
TX4 RX4
UART4
Em seu GPS
TX5 RX5
UART5
Reposição
TX6 RX6
UART6
Reposição
ArduPilot mapeamento
PWM
S1~S9 & LED são Dshot e PWM capaz.No entanto, a mistura de Dshot e normal PWM operação para saídas é restrito em grupos, ou seja,.permitindo Dshot para uma saída em grupo requer que TODAS as saídas em grupo que ser configurado e usado como Dshot, em vez de saídas de PWM.
Se o servo e o motor são misturados em um mesmo grupo, certifique-se de que este grupo de executar menor freqüência PWM de acordo com o servo de especificação.ou seja.Servo suporta Max. 50Hz, ESC deve executar a 50Hz neste grupo.
S1
PWM1 GPIO50
TIM4_CH2
Grupo1
S2
PWM2 GPIO51
TIM4_CH1
S3
PWM3 GPIO52
TIM3_CH3
Grupo2
S4
PWM4 GPIO53
TIM3_CH4
S5
PWM5 GPIO54
TIM8_CH3
Gourp3
S6
PWM6 GPIO55
TIM8_CH4
S7
PWM7 GPIO56
TIM1_CH2N
Gourp4
S8
PWM8 GPIO57
TIM1_CH3N
S9
PWM9 GPIO58
TIM1_CH1
LED
PWM10 GPIO59
TIM2_CH1
Gourp5
SERVO10_FUNCTION 120, NTF_LED_TYPES neopixel
ADC
Sem almofada
1K:10K divisor interno
6~30V entrada
a bordo de tensão da bateria
BATT_VOLT_PIN
BATT_VOLT_MULT
10
11.0
Sem almofada
0~3,3 V
a bordo de um sensor de corrente
BATT_CURR_PIN
BATT_AMP_PERVLT
11
40
RSSI Pad
0~3,3 V
RSSI ADC
Analógico RSSI
RSSI_ANA_PIN
RSSI_TYPE
15
2
I2C
I2C2
Digital de Velocidade I2C
ARSPD_BUS
ARSPD_PIN
1
65
MS4525
MS5525
DLVR-L10D
ARSPD_TYPE
1
3
9
I2C2
Bússola
COMPASS_AUTODEC
1
I2C1
a bordo de Baro DPS310
UART
USB
USB
console
SERIAL0
RX1 TX1
USART1
telem1
SERIAL1
TX2 RX2, SBUS
USART2
RC de entrada/Receptor
SERIAL2
TX3 RX3
USART3
GPS1 *
SERIAL3
TX4 RX4
UART4
GPS2 *
SERIAL4
TX5 RX5
UART5
UTILIZADOR
SERIAL5
TX6 RX6
USART6
UTILIZADOR
SERIAL6
*Se ligar apenas um GPS para UART4(TX4/RX4), pls conjunto SERIAL3_PROTOCOL -1 ou não "5".caso contrário ArduPilot vai parar de procurar o GPS durante o arranque, se não encontrado na primeira porta configurada para GPS protocolo.Frsky Smartport De Telemetria
não invertido (hacked) S. Porta de sinal
qualquer reposição Uart_TX
SERIALx_BAUD 57
SERIALx_OPTIONS 7
SERIALx_PROTOCOL 4 ou 10(para yaapu) DJI FPV OSD (ArduPilot 4.1)
OSD_TYPE = 3
SERIALx_PROTOCOL = 33
MSP_OPTIONS = 0 (modo de consulta)
- Distância entre eixos: Placa De Fundo
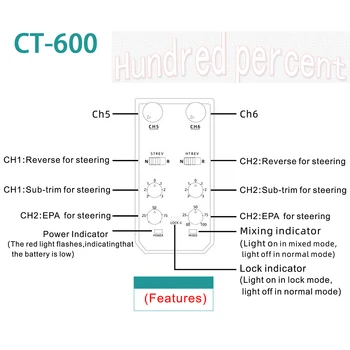
- Controle Remoto Periféricos/Dispositivos: Controlador Remoto
- Utilização: Veículos E Brinquedos De Controle Remoto
- RC Peças e Accs: Controladores De Velocidade
- Ferramenta De Suprimentos: Montado classe
- Material: Material Composto
- Número Do Modelo: Mateksys MATEK F405-WSE
- Para O Tipo De Veículo: Aviões
- Quatro rodas Atributos: Assemblage
- Origem: CN(Origem)
5 Comentários

Cyates94 - 2021-12-28
O envio rápido, produto excelente qualidade..
Sengaaar - 2021-12-21
O vendedor bem feito, muito bem embalado, mandou logo!!! Recomendo!!!!.
Melnichuk199 - 2021-12-10
Como por Matek descrição .
Seano2020 - 2022-01-11
Enviadas em uma semana. Foi de 12 dias..
Omar Omar4868 - 2021-12-10
Como por Matek descrição .
Adicionar A Sua Crítica
Produtos relacionados



RC Quad F330 Braço Braços de Plástico Super braços Fortes branco/vermelho/preto para F330 Quadro Quadcopter RC Drone FPV
F330 Flamewheel Substituição do Braço Adequado para DIY seus próprios quadcopter Estes braços são construídos a partir de materiais muito fortes, esses braços são feitos a partir de ultra forte, PA66+30GF material que proporciona maior resistência a danos no disco rígido desembarques.Cor: vermelho,
R$20.34


10A ESC Escovado Controlador de Velocidade com o Freio de 1/12 1/16 1/18 1/24 RC Carro Rastreador WPL C24 B16 B24 MN D90 MS RC Barco
10A ESC Escovado Controlador de Velocidade com o Freio de 1/12 1/16 1/18 1/24 RC Carro Rastreador WPL C24 B16 B24 MN D90 MS RC Barco da Marca 100% novo e de alta qualidade Três modo de execução (para a Frente, Freio, Inversa) 10A escovado ESC para 1/12 1/16 1/18 1/24 RC Carro Barco Especificação: tensão
R$37.01
R$22.94




Nova Escala 1/14 segundo andar placa do Caminhão de Controle Remoto Móvel Porta para 1:14 IVECO modelo de engenharia de frente RC Trator Actros
Idade: 14 anos e acima Lugar de Origem: China Aplicável gênero: neutro Brinquedo tipo: elétrico do brinquedo Classificação de cores: Branco, IVECO segundo andar, IVECO guarda-lamas, IVECO carro shell de fivela Idade: ≥14 anos de idade 1/14 Simulação
R$2 028.73
R$1 014.36


130mm de Alumínio Deslocamento de Oleo Amortecedores do trem de pouso de 4mm de gravação com PU de pneus 55*15mm modelo de RC, peças de avião
130mm de Alumínio Deslocamento de Oleo Amortecedores do trem de pouso de 4mm de gravação com PU de pneus 130mm de Alumínio Deslocamento de Oleo Amortecedores do trem de pouso de 4mm de gravação com PU de pneus Marca: MD Nenhum Item.: MD-13040 Alume Olem Amortecedores
R$132.48


4/5pcs 3,7 V 220mah Bateria de Lipo PH1.25 Conector Para RC Drone Mini Quadcopter Helicóptero Peças de Reposição 802025 20C Conjunto de Bateria
Especificações: Capacidade da bateria: 3,7 V 220mAh Compatível com: RC Mini Quadcopter Drone Bateria dimensão: 29*20*8mmcm ± 0-3mm Peso da bateria: Cerca de 7g / pcs Lista de embalagem: 4pcs*3.7 V 220mah bateria de lipo 5pcs*3.7 V 220mah bateria
R$42.87
R$30.02


SUPERAR HOBBY 4130 Motor Brushless C5065 Outrunner RC Motor 435KV 335KV para Airpalne Aeronave Multicopters RC Avião Helicóptero
Características: 14 Pole 12 slot hi-torque do motor de design de usinagem CNC 6061 T6 boleto dissipador de alumínio de Alta pureza pode enrolamentos de cobre maximiza a eficiência de Alta RPM ABEC5 de grandes dimensões rolamentos de Precisão rotor balanceado, suavidade para melhor confiabilidade e RPM
R$326.58
R$192.68



PDI-HV2006MG JX Servo 6,2 kg de Metal Gear Full CNC Coreless HV Servo Digital de Planador RC 450 Classe de Helicóptero Cauda do Swashplate 30E
Bem-vindo à nossa loja na China tem um exame de armazém a granel lugar de alimentação, atacado de cooperação podem ser enviadas para :[email protected] ou WeChat contato: WJX88999 Características: ---Este servos é sutiable para o interior para o exterior RC drone, helicóptero, etc. ---Digital
R$143.64


ISDT BG-8S Medidor de Bateria do LCD Display Digital, Capacidade da Bateria Verificador de Bateria Balanceador de Testador de Bateria De LiPo
Características: 1. Fazer a bateria de forma mais inteligente.Cooperar com a tecnologia, apenas com XT60i conectado e você pode obter o conhecimento em detalhe parâmetros em sua bateria. 2. De fácil leitura, as células de tensão, bateria ciclos, os parâmetros de trabalho e rápida para
R$249.72
R$187.27



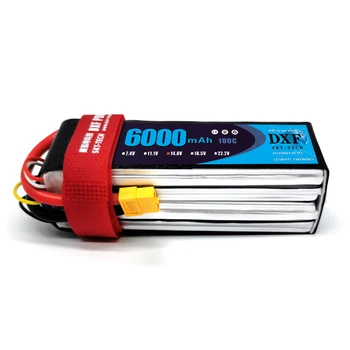
DXF 4S 14.8 V 6000mah 50C-100C Bateria Lipo 4S XT60 T Reitores XT90 EC5 50C Para Corridas FPV Drones, Aviões Carro Off-Road, Barcos
DXF bateria de Lipo - Estável automático de empilhamento tecnologia permite que uma única célula capacidades de 6000mAh. - Maior capacidade durante a descarga pesada.Mais de 90% a 100% C preço. - Carga rápida, capaz, até 5C em algumas baterias. - Ciclo de Vida mais longo,
R$530.12
R$323.37


ALZRC - Diabo X360 Helicóptero Peças de Liga de Alumínio de Frente Cauda Polia de Hub DX360-34 para GAUI X3
ALZRC - Diabo X360 Helicóptero Peças de Liga de Alumínio de Frente Cauda Polia de Hub DX360-34 para GAUI X3 Descrição Da Função: ● Em alumínio 6061-T6 liga cheia de processamento do CNC. ● Para O Diabo X360. pacote: ● Superior da engrenagem x 1 ●
R$73.76
R$71.57


5Pcs Rotativa em forma de Parafuso EA1008 para JLB Corrida de CHITA 11101 21101 J3 VELOCIDADE 1/10 Carro RC Acessórios de Peças
Marca 100% Novo Feito de Material de Alta Qualidade, mais Forte E Mais Durável, Melhorar A Aparência Especificações:adequadas para:JLB Corrida de CHITA 11101 21101 J3 VELOCIDADE 1/10 Carro RC cor: preto Material: metal Conteúdo Do Pacote: 5 * o rotary parafuso Apenas
R$24.26
R$18.20


Arkbird 2.0 Lite OSD FPV Piloto automático, Controlador de Vôo do Sistema com M8N GPS do Sensor de Corrente de Cabos Neccessory
Arkbird FPV OSD Piloto automático 2.0 Lite Controlador de Vôo do Sistema com M8N GPS do Sensor de Corrente de Cabos Neccessory PS: Todos os pacotes padrão XT60 ficha, se você precisa de um T plug do sensor de corrente, por favor contacte o serviço ao cliente para a mudança para você. Configuração
R$806.44


HQprop Ethix Série de Hélice S3/S4/S5/P3 5inch Adereços Misto 5031 5040 5133 3-a Lâmina do RC FPV Freestyle Racing Drone CW CCW HQ
HQ Ethix S3/S4 Prop 5X3.1X3 Hélice Hélice diâmetro: 5 cm Pitch: 3.1/3.65 Lâmina: 3 Material: PC Peso: 3,6 g/PCS Centro de diâmetro: 12,5 mm /12.8 mm Centro de espessura: 6mm Eixo: 5mm Anel adaptador: Nenhum HQ Ethix S5 Prop
R$89.15
R$71.31


4Pcs/ lote de Alumínio 5/6/7mm Roda Hex 12mm Unidade de Hubs Com Pinos Parafusos Para Carro RC Rastreador de Caminhões HSP IPH Tamiya Traxxas Slash
Especificações: Material: liga de Alumínio Quantidade: 4PCS Adaptador hex: 12mm Diâmetro do furo: 5mm Adaptador de espessura: 5mm / 6mm / 7mm Adequado para 1/10 buggy off-road monster truck curso de curta duração em estrada plana carro RC. Pacote
R$14.32
R$8.46


HSP RC AUTOMÓVEL ACESSÓRIOS PEÇAS DE REPOSIÇÃO 58047 58113 58110 58111 58046 PARA HSP ESCALA 1/18 ELÉTRICO ALIMENTADO CARRINHO DE CONTROLE REMOTO 94805
Termos Do Transporte Pedido será enviado em até 7 dias úteis após o pagamento recebido.Os itens são enviados da China (parcial itens da nossa Espanha warehouse) utilizando o correio Aéreo, Courier, Express (com base na sua escolha), alcançar a maioria dos países dentro 7-35 dias úteis. Retorna
R$101.90
R$99.86

Rovan 1/5 do Motor Elétrico de velocidade para BAJA LT CAMINHÃO peças Eletrônicas Elétrica LT/SLT 19T 8709001
Rovan 1/5 Elétrica BAJA LT CAMINHÃO peças Eletrônicas Elétrica LT/SLT Motor de engrenagem 19T 8709001 Nós também pode escolher o melhor transporte rápido para você de acordo com seu pedido.Qualquer problema de qualidade acontece devido a um problema nosso.Nós seremos responsáveis para que,
R$47.81




12mm Combinador cubo de Roda Hex Adaptador para MN86K MN86KS MN86 MN86S MN G500 1/12 RC Upgrade de Carro Acessórios Peças
12mm Combinador cubo de Roda Hex Adaptador para MN86K MN86KS MN86 MN86S MN G500 1/12 RC Upgrade de Carro Acessórios Peças Características: Feito de Metal de Alta Qualidade, mais Forte E Mais Durável, Melhorar A Aparência Adequado para:MN86K MN86KS MN86 MN86S MN G500 1/12 Carro
R$7.14
R$5.00


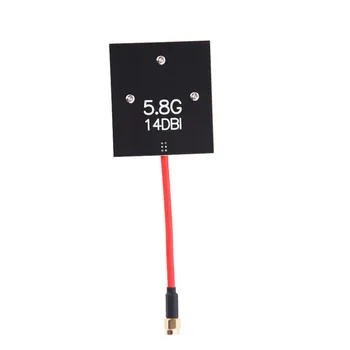
5.8 G de Alto Ganho 14dBi Antena do Painel RC Multirotor Aviões Antena de asa Fixa/Multicopter RPSMA / SMA Opcional
Direito de antena de polarização circular para a FPV receptor multicopter 96mm/3.7 polegadas macio cabo, poderia dobrados em qualquer direção Built-in de alta frequência (PCB), mais estável Alta qualidade e durável Fácil instalação Especificações: Tipo:
R$49.29
R$39.45